Distributed Robotics : Control of a Sprawling Quadruped Robot
Using Central Pattern Generators
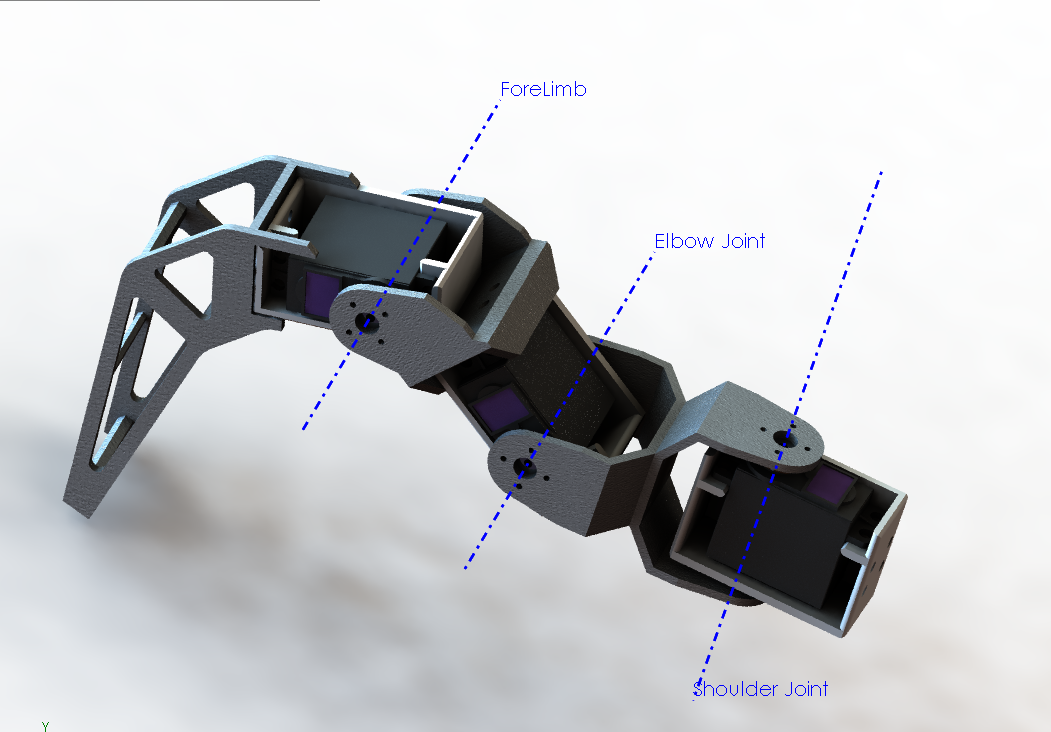
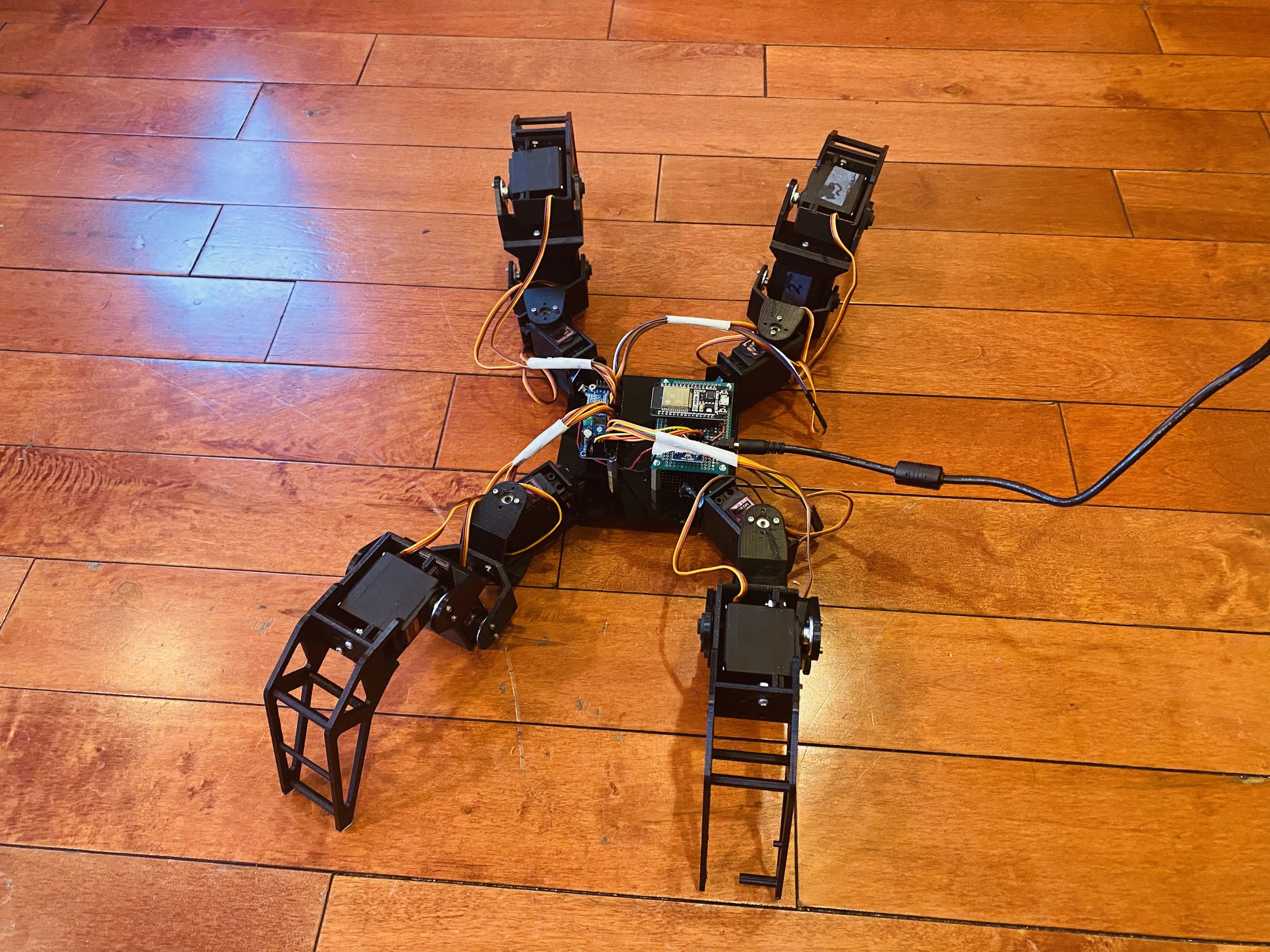
This project focused on designing and implementing a Central Pattern Generator (CPG)-based control system for a custom-built quadruped robot as was done in collaboration with Ryan Adolf as a final project for the Distributed Robotics Course at the University of Pennsylvania . A sprawling, 12-DOF quadruped was developed with servo-actuated limbs and an ESP32 microcontroller as the primary control unit. The ESP32 generates rhythmic joint trajectories using biologically-inspired CPG algorithms to produce various gaits such as trot, walk, and bound. Motion control is achieved either through direct programming or via a wireless Bluetooth controller for real-time interaction.
Project Aim
The goal of this project was to explore the advantages and limitations of using CPGs in robotic locomotion and investigate how different parameters and coupling structures affect stability, gait transitions, and responsiveness. Several improvements and alternative approaches to CPG control were proposed based on experimental results
Project Work Breakdown
Central Pattern Generator (CPG) Implementation
Mathematical Model:
Used coupled non-linear oscillators to generate rhythmic outputs.
Each joint angle is governed by phase-coupled oscillators with tunable parameters: amplitude, frequency, and phase offset.
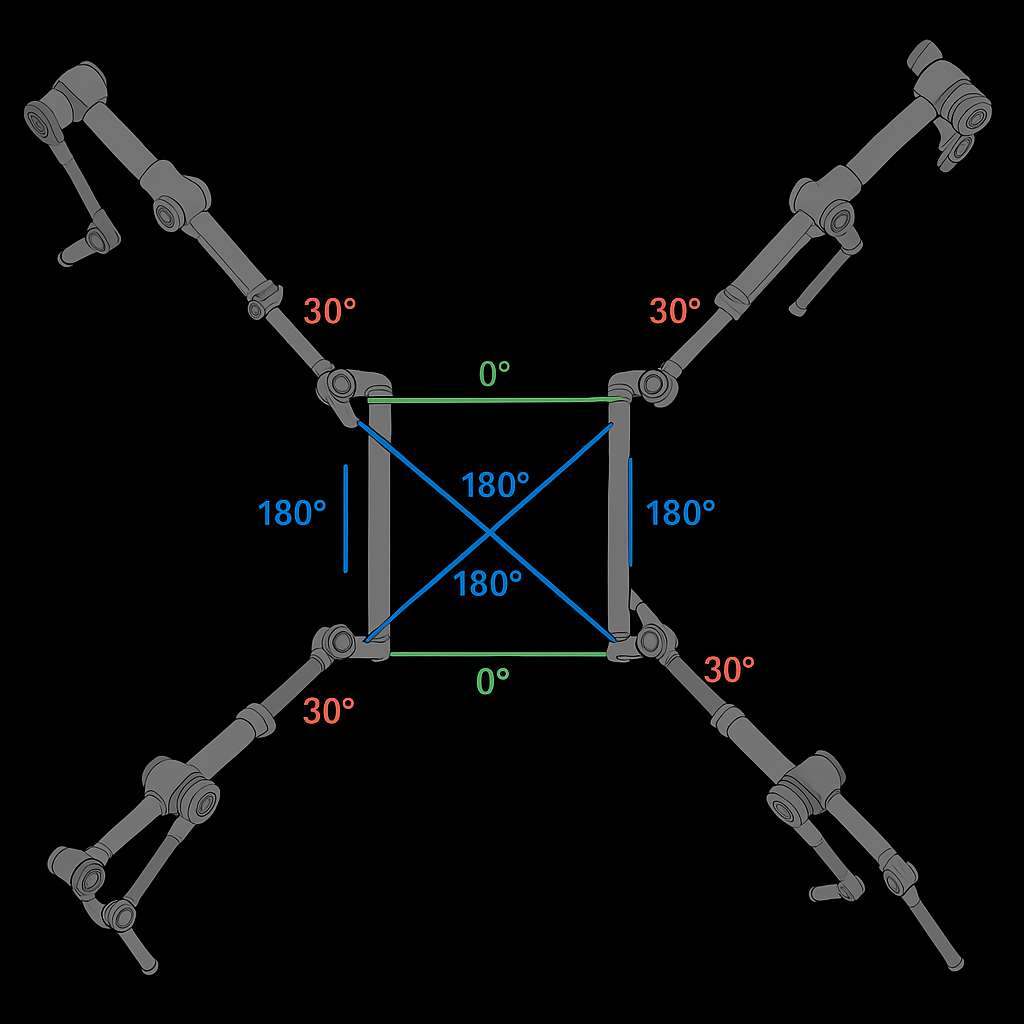
Gait Generation:
Implemented multiple gaits:
Trot: diagonal legs move together.
Walk: legs move sequentially.
Bound: front and rear legs move in unison.
Phase offsets and inter-oscillator coupling determine the coordination pattern.
Tuning Parameters:
Real-time modulation of amplitude and frequency via Bluetooth to experiment with step size and speed.
Explored entrainment (synchronization) effects when perturbations were applied.
4. Experiments and Results
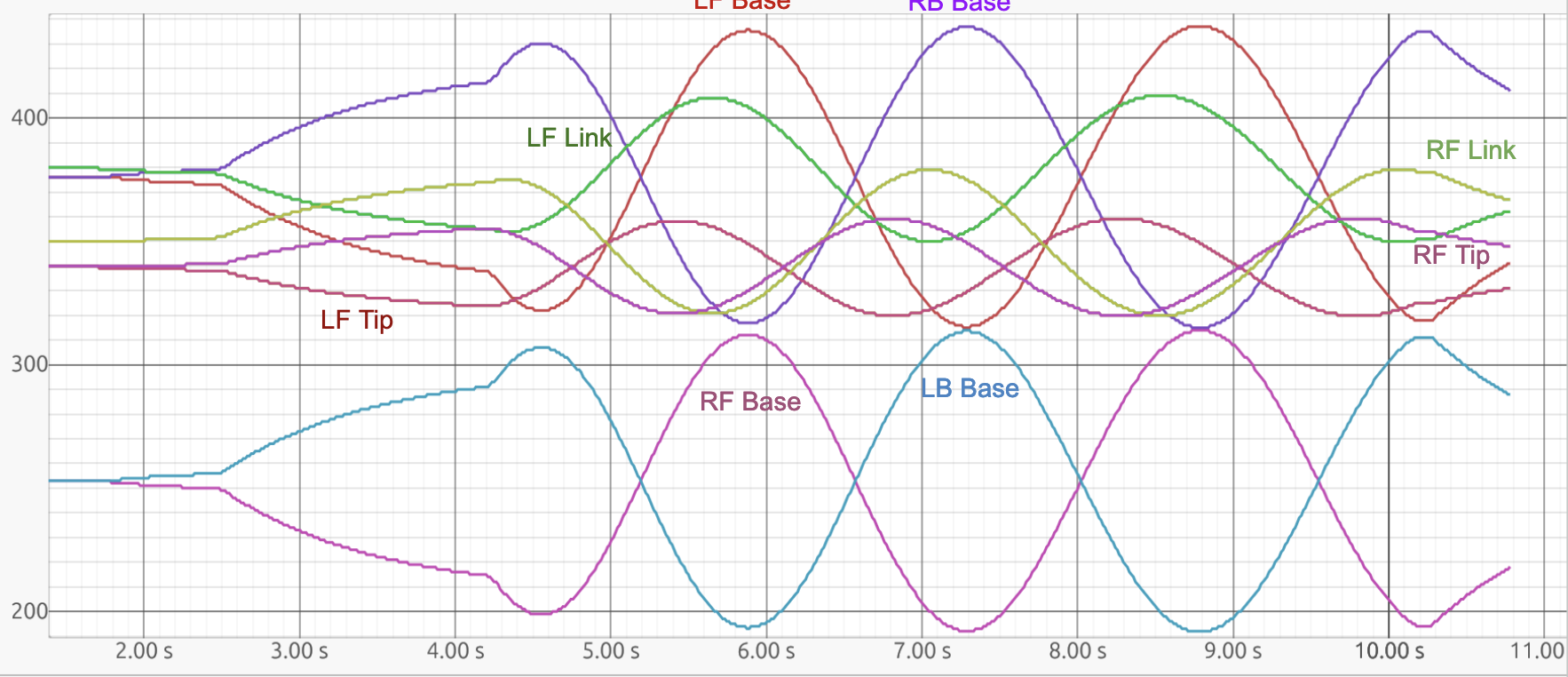
Gait Stability Tests:
Evaluated different CPG structures for smoothness, phase coherence, and robustness to noise.
Trot and walk gaits were more stable at low frequencies; bound was harder to stabilize without slipping.
CPG Behavior Observations:
Advantages:
Smooth, cyclic joint trajectories.
Easy modulation for speed and gait transitions.
Bio-inspired and computationally lightweight.
Limitations:
Poor adaptability to uneven terrain without external feedback.
Requires careful tuning of parameters to prevent instability.
Limited trajectory customization for complex maneuvers.
5. Proposed Improvements
Add sensory feedback (e.g., contact sensors, IMU) for closed-loop CPG control.
Use adaptive CPG models that adjust oscillator parameters based on performance metrics.
Explore hybrid CPG + inverse kinematics for terrain adaptation.
Move to multi-layer control architecture (CPG for rhythm, higher-level planner for task decisions).