DGR : Wheeled Mobile Robot
I designed this wheeled robot as a compact, custom-built platform designed to explore spaces, avoid obstacles, and track movement over time. It’s powered by two microcontrollers—one handles the motors and IMU for low-level control, while the other takes care of the camera, TOF distance sensor, and decision-making. I also integrated all the components on a protoboard .
Project Aim
The aim of this project was to teach myself how to design and implement a complete mobile robotics platform—from hardware integration and embedded control to real-time sensing and autonomous behavior. The robot was great for experimenting with navigation, mapping, and robot communication protocols , and served as a hands-on learning tool for the concepts I learnt during my masters program.
Project Work Breakdown
System Architecture
1. Hardware Architecture
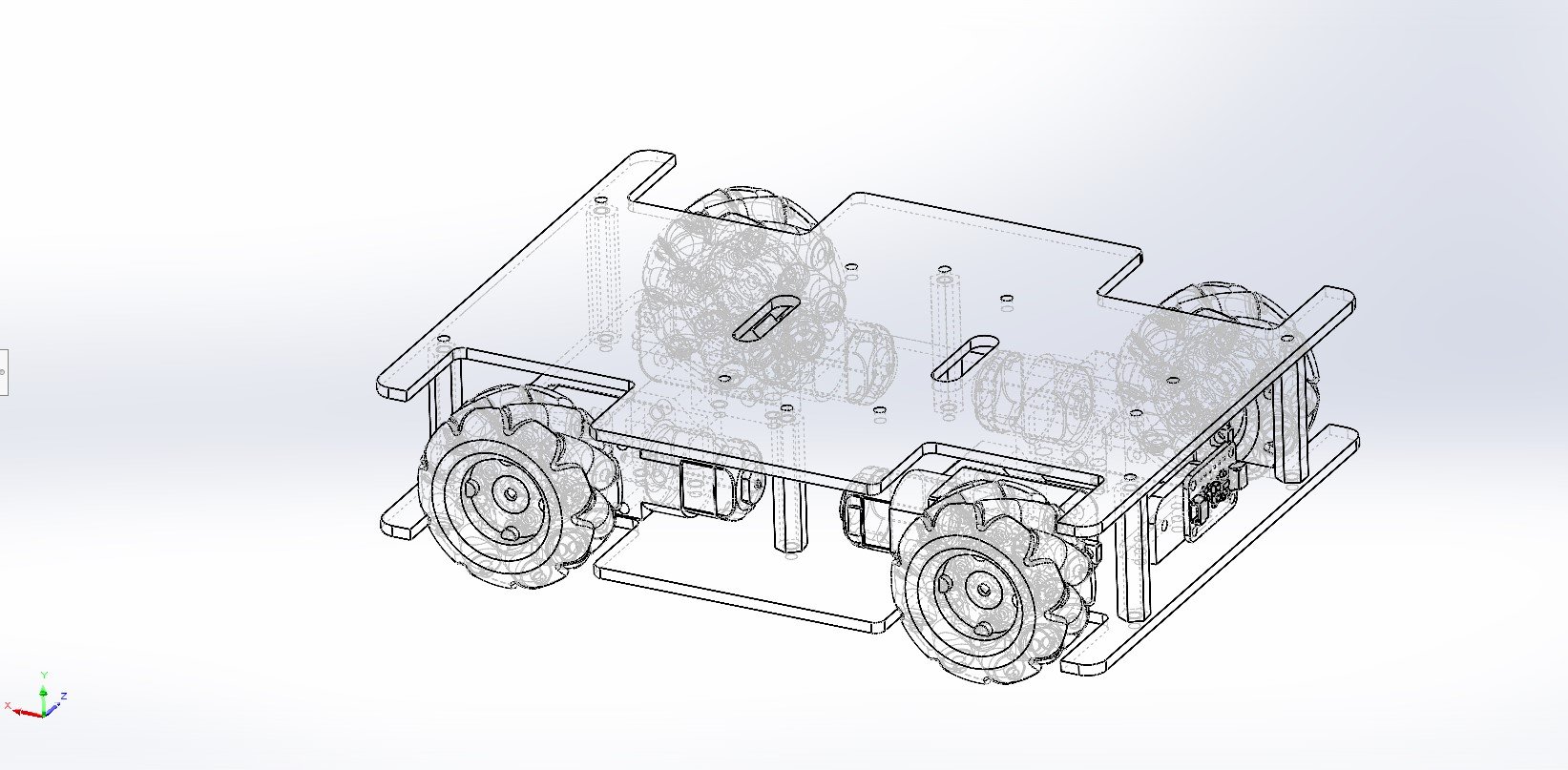
Chassis and Actuation
4-Wheeled Differential Drive with Mechanum wheels for Omni-directional Movement connected
to geared DC motors.
Compact design from Laser-cut Acrylic optimized for maneuverability in tight spaces and sensor mounting.
Microcontroller Stack
ItsyBitsy M4:
Reads data from the IMU (MPU6050).
Controls motors using PWM for velocity and steering.
Outputs encoder or odometry data to the high-level controller.
ESP32 C3:
Handles TOF laser range sensor.
Communicates with Control Program via Wi-Fi and tested with ESP32 Now.
The ESP32 C3 was later switched out for the ESP32 Cam
Electronics
Combined power management, level shifting, motor drivers, and sensor interfaces with components
soldered on a Protoboard